
Some details
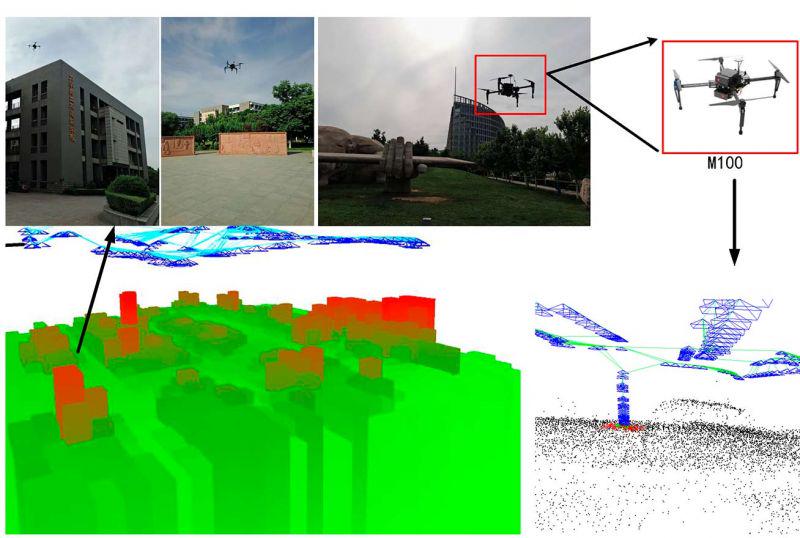
We developed an aerial optical navigation system based on drone machine vision SLAM algorithms (relative optical navigation), Algorithm of the Morphological Correlation-Extreme Navigation System. It is an absolute navigation system for a preloaded map and IMU. All these three information layers were combined by a single filter, taking into account the budget of errors and the time of reliability of the data of each information
layer. This filter actually made a decision about the actual position of the object.We also improved the stability of MEMS IMU readings by using redundant navigation systems in non-orthogonal positions. This allowed obtaining high stability indicators for household IMU.
Drone aerial machine vision, according to the conditions of the task, had to determine its location no worse than 2 meters after it had flown 70 kilometers without the use of GPS.
Technologies used:
- Obstacle avoidance algorithms
- SLAM
- Stereovision
- MEMS IMU
- GPS


